一種感應電動機反饋型間接矢量控制系統及其控制方法研發
隨著工業自動化水平的不斷提高,感應電動機因其結構簡單、成本低、維護方便等優點,被廣泛應用于各類驅動系統中。傳統的感應電動機控制方法在動態性能和精度方面存在一定局限性。為了克服這些問題,本文介紹了一種感應電動機反饋型間接矢量控制系統及其控制方法,該系統通過優化控制策略,顯著提升了電機的運行效率和動態響應能力。
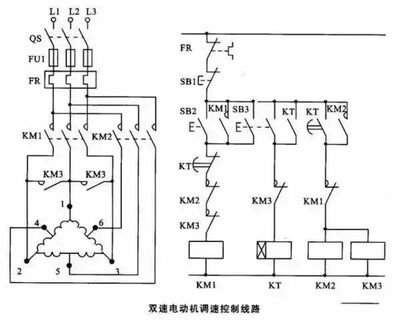
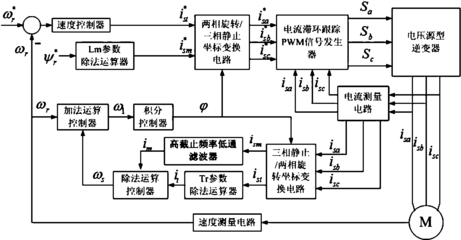
反饋型間接矢量控制系統結合了矢量控制理論和現代反饋技術。系統主要包括感應電動機、電流傳感器、速度傳感器、矢量控制器以及PWM逆變器等組件。通過實時采集電機電流和轉速信號,系統能夠精確計算磁鏈和轉矩分量,并利用間接矢量控制算法實現解耦控制。這種方法有效降低了電機參數變化對系統性能的影響,提高了控制的魯棒性。
在控制方法方面,系統采用基于模型參考自適應(MRAS)的反饋機制,實現對轉子磁鏈的準確估計。通過對比實際輸出與參考模型的差異,控制器動態調整控制參數,確保系統在各種負載條件下均能保持穩定運行。系統還引入了先進的速度環和電流環控制策略,如PI調節器和前饋補償,進一步優化了動態響應和抗干擾能力。
該系統的研發不僅提升了感應電動機的控制精度,還通過專利保護促進了相關技術的推廣和應用。實驗結果表明,在工業現場應用中,該系統能夠實現高效率、低振動的運行,適用于風機、泵類以及機床等高性能驅動場景。隨著智能控制算法的不斷發展,該系統有望在更多領域發揮重要作用,推動電機及其控制系統的技術進步。
如若轉載,請注明出處:http://m.zyfk120.com/product/3.html
更新時間:2026-02-20 04:56:16