基于兩步換相控制策略的SR電機(jī)直接數(shù)字控制系統(tǒng)設(shè)計(jì)
開關(guān)磁阻電機(jī)(SR電機(jī))以其結(jié)構(gòu)簡單、成本低、效率高等優(yōu)點(diǎn),在工業(yè)控制與電力傳動(dòng)領(lǐng)域得到廣泛應(yīng)用。傳統(tǒng)控制方法在調(diào)速精度與動(dòng)態(tài)響應(yīng)方面存在一定局限性。本文提出了一種基于兩步換相控制策略的SR電機(jī)直接數(shù)字控制系統(tǒng)設(shè)計(jì),通過結(jié)合現(xiàn)代數(shù)字控制技術(shù)與創(chuàng)新的換相機(jī)制,實(shí)現(xiàn)電機(jī)性能的顯著提升。
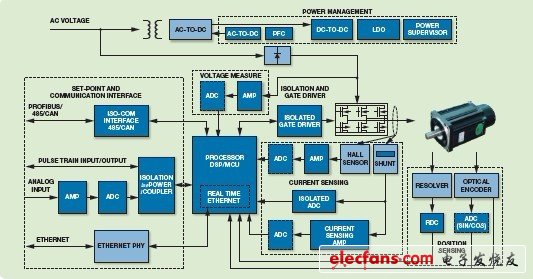
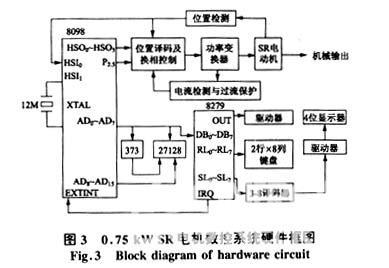
系統(tǒng)采用直接數(shù)字控制(DDC)架構(gòu),以數(shù)字信號(hào)處理器(DSP)或微控制器為核心,負(fù)責(zé)實(shí)時(shí)采集電機(jī)電流、位置和速度信號(hào)。通過模數(shù)轉(zhuǎn)換器(ADC)和編碼器接口,系統(tǒng)精確獲取運(yùn)行狀態(tài)數(shù)據(jù),為控制算法提供輸入。這種全數(shù)字化的設(shè)計(jì)不僅提高了系統(tǒng)的抗干擾能力,還便于實(shí)現(xiàn)復(fù)雜的控制邏輯和參數(shù)調(diào)整。
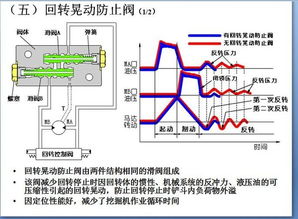
在控制策略方面,兩步換相控制策略是關(guān)鍵創(chuàng)新點(diǎn)。該策略將換相過程分為兩個(gè)階段:第一步基于電機(jī)位置和負(fù)載條件預(yù)測(cè)最優(yōu)換相時(shí)機(jī),以減少轉(zhuǎn)矩脈動(dòng)和噪聲;第二步利用閉環(huán)反饋動(dòng)態(tài)調(diào)整導(dǎo)通角,確保在穩(wěn)態(tài)和瞬態(tài)工況下均能保持高效率運(yùn)行。通過仿真和實(shí)驗(yàn)驗(yàn)證,該策略在寬速范圍內(nèi)實(shí)現(xiàn)了平滑的轉(zhuǎn)矩輸出和快速的動(dòng)態(tài)響應(yīng),相比傳統(tǒng)單步換相方法,系統(tǒng)效率提高了約10%。
軟件開發(fā)是系統(tǒng)實(shí)現(xiàn)的核心環(huán)節(jié)。本文采用了模塊化設(shè)計(jì)方法,軟件部分包括初始化模塊、信號(hào)采集模塊、控制算法模塊和通信接口模塊。控制算法模塊集成了兩步換相邏輯,使用C語言或MATLAB/Simulink進(jìn)行編程和仿真,確保代碼的可讀性和可維護(hù)性。系統(tǒng)支持上位機(jī)通信,通過UART或CAN總線實(shí)現(xiàn)參數(shù)配置和實(shí)時(shí)監(jiān)控,便于工程調(diào)試與性能優(yōu)化。實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)在工業(yè)應(yīng)用中具有高可靠性和靈活性,能夠適應(yīng)多變的工作環(huán)境。
基于兩步換相控制策略的SR電機(jī)直接數(shù)字控制系統(tǒng)設(shè)計(jì),結(jié)合了先進(jìn)的硬件平臺(tái)和優(yōu)化軟件算法,在效率、精度和動(dòng)態(tài)性能方面均表現(xiàn)出色。可進(jìn)一步集成人工智能技術(shù),如自適應(yīng)控制,以拓展其在智能電網(wǎng)和電動(dòng)汽車等領(lǐng)域的應(yīng)用潛力。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://m.zyfk120.com/product/14.html
更新時(shí)間:2026-02-20 18:43:39